Are you interested in doing your Bachelors or Masters thesis at V4RL? We have the following projects available for students at both UCY and ETH Zurich. Please contact the listed person responsible.
V4RL Student Projects
-
Versatile, Robust and Simulatable Multi-Robot SLAM
This project aims to develop multi-robot SLAM capabilities able to perform in such challenging, real environments, forming the basis of navigation autonomy and coordination of a swarm of drones.
-
LiDAR-Visual-Inertial Odometry with a Unified Representation
The goal of this project is to develop a lidar-visual-inertial odometry approach that integrates visual and lidar measurements into a single unified representation.
-
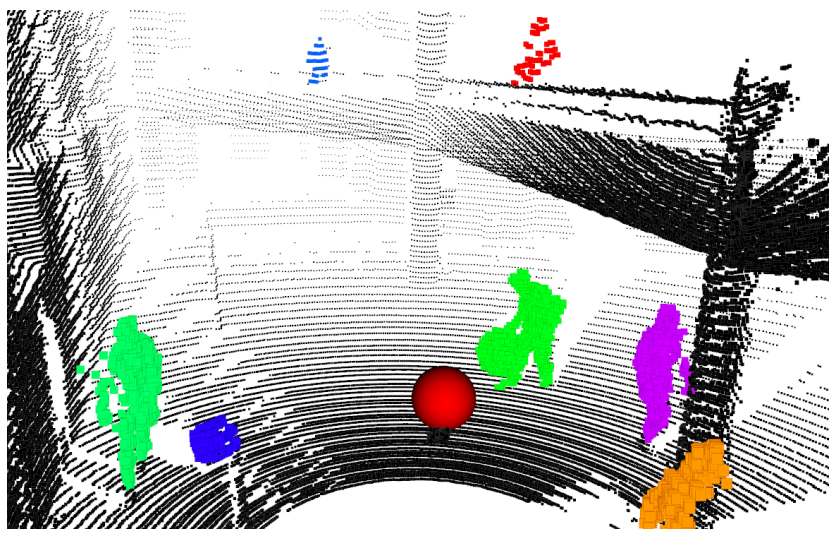
Odometry and Mapping in Dynamic Environments
The goal of this project is to develop a lidar-inertial odometry approach that tightly integrates dynamic object filtering into the pose estimation and mapping pipeline.
-

Continuous-Time Multi-Sensor Odometry in the Wild
The goal of this project is to develop a robust, continuous-time multi-sensor odometry system that can handle multi-rate synchronization.
-
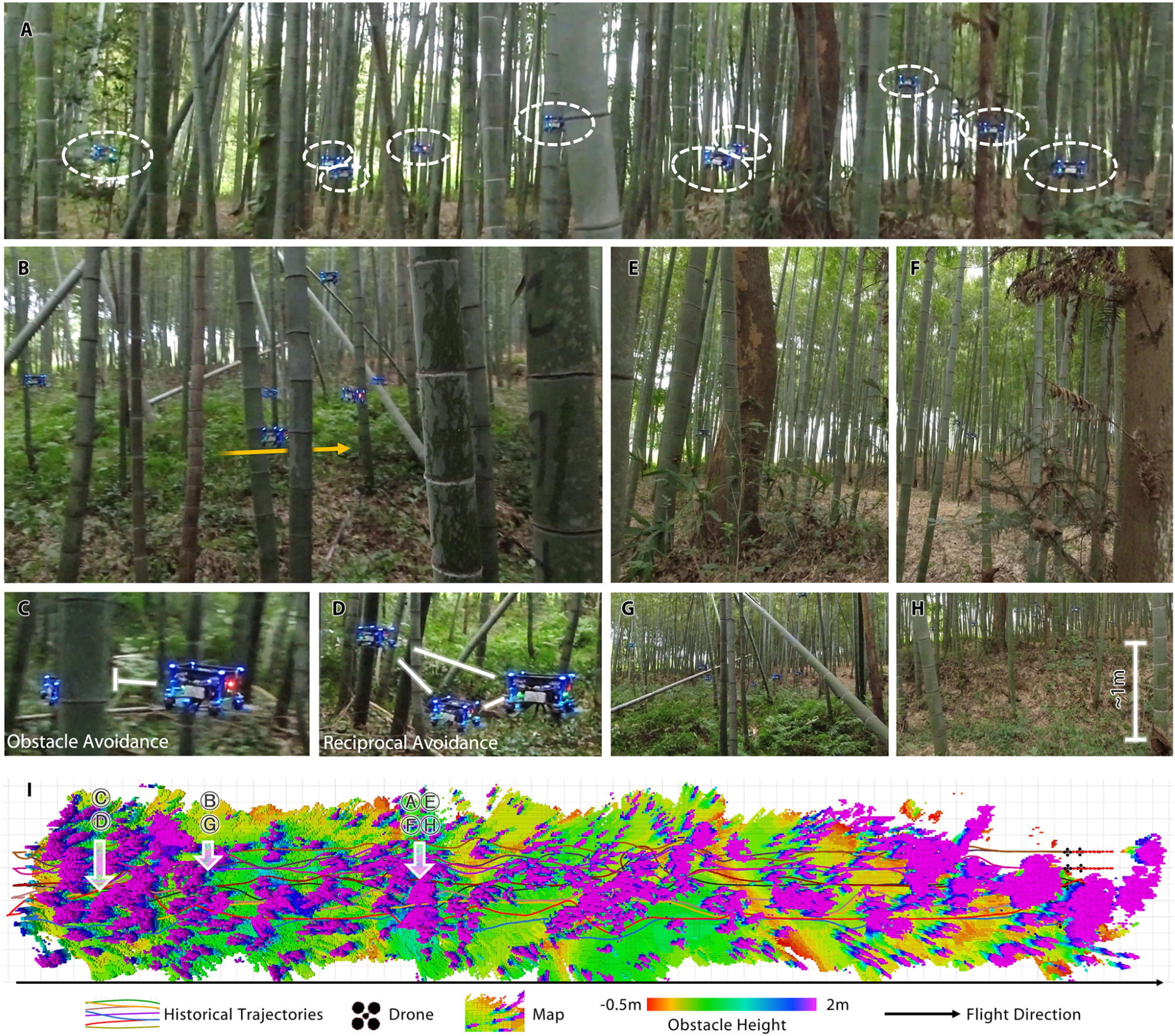
Collision Avoidance - Master Thesis with Avientus
The objective of the thesis is to develop an algorithm capable of real-time collision avoidance for drones.