Versatile, Robust and Simulatable Multi-Robot SLAM
Semester/Masters Project
This project aims to develop multi-robot SLAM capabilities able to perform in such challenging, real environments, forming the basis of navigation autonomy and coordination of a swarm of drones.
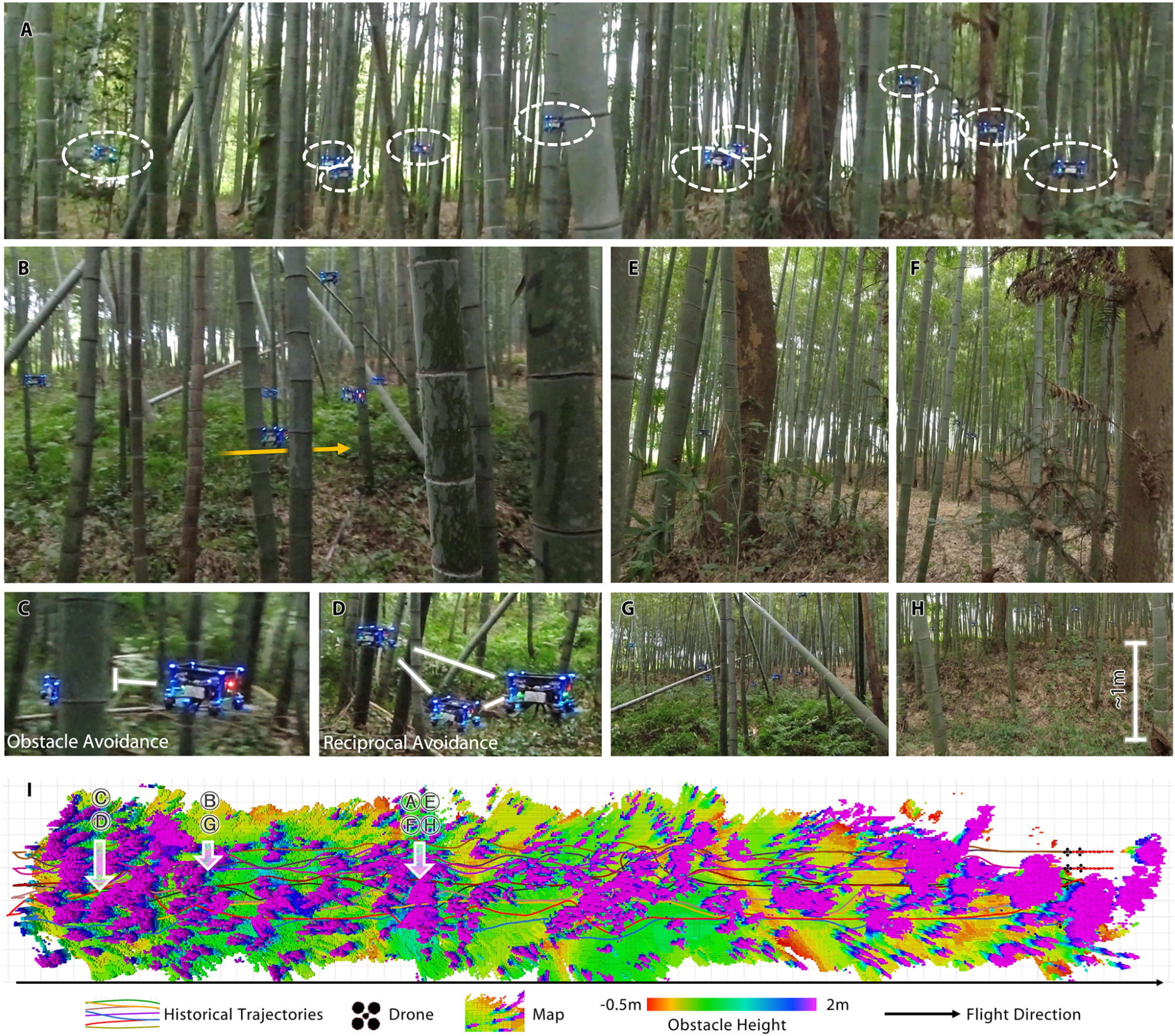 Mapping and navigation of a drone swarm in a clustered forest area [1]
Mapping and navigation of a drone swarm in a clustered forest area [1]
Background
Recent work on multi-robot systems with collaborative autonomy has made significant strides towards developing robotic teams capable of performing complex tasks in real, complex settings as shown above. Right at the core of such capabilities is the capability to collaboratively perform SLAM (Simultaneous Localization And Mapping) within such multi-agent systems that can operate efficiently and in challenging real-world environments, which is the main goal of this project.
Description
What’s better than one robot mapping the world? A whole team doing it together. This project explores how multiple robots can collaborate to localize themselves and build a shared map, both in simulation and real-world scenarios. You’ll work on multi-agent SLAM, communication strategies, and map merging, tackling challenges like consistency and scalability as more robots join the system. The project combines theory with hands-on experimentation, making it perfect if you’re excited by robot swarms, distributed systems, or search-and-rescue applications where teamwork is key.
Work Packages
- The work packages of this project involves, literature review of existing research on multi-robot SLAM, develop new SLAM algorithms for identified challenges, and validate algorithms in simulation and with real-world experiments
Requirements
- The students taking this project need to have programming experience with Python and C++, ROS and/or ROS 2
References
- [1] Zhou, Xin, et al. “Swarm of micro flying robots in the wild.” Science Robotics 7.66 (2022): eabm5954.